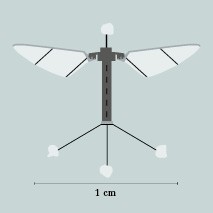

At Harvard University, researchers from a wide range of fields are working on a minuscule flying robot. The size of a bee, it is intended to explore inaccessible areas in a swarm or act as an artificial pollinator in the future.
More and more robots are being released onto the market whose form and function confound our preconceptions of machines. One of these rather unusual robotic applications is being developed at Harvard University: the “RoboBee”. In their project, the scientists aim to create an autonomous robotic insect which can fly continuously and independently. One day, such robots are intended to conduct fact-finding missions, help with telecommunications or even operate as artificial pollinators.
Controlled flight
The researchers from Harvard have been working together with colleagues from Northeastern University on the project for several years. As early as 2012, the scientists were able to astound the public by demonstrating the first controlled flight taken by an insect-sized robot. Since then, they have developed ever smaller and more demanding robots. One day, these should be able to fly entirely autonomously.
In order to achieve this goal, the scientists needed to push forward with preparatory research in many different fields: these include micro-manufacturing methods and materials for microscopically small propulsion systems, energy storage devices on the smallest possible scale and even algorithms needed to effectively control individual RoboBees or entire swarms of them.
Highlights include new methods for manufacturing devices that are just millimetres in size, for which layering and folding technology were implemented. New sensors have also been developed which can be used in the low-power range or in portable computers. Special architectures for ultra-low-power computer systems are another result of the development efforts. Finally, the scientists wrote algorithms for coordinating hundreds or even thousands of robots, thus enabling them to operate together effectively.
Taking inspiration from nature
The project team also took a cue from nature – particularly from the capabilities that let insects take off, navigate and perform agile manoeuvres without external help and in spite of their tiny bodies.
“Bees and other social insects provide a fascinating model for engineered systems that can manoeuvre in unstructured environments, sense their surroundings, communicate and perform complex tasks as a collective full of relatively simple individuals,” says Robert Wood, who heads the project. “The RoboBees project grew out of this inspiration and has developed solutions to numerous fundamental challenges – challenges that are motivated by the small scale of the individual and large scale of the collective.” The current RoboBees weigh a mere 84 milligrams – making them even lighter than real bees at roughly the same size. Currently, the team is working on enabling the mini-robots to detect their surroundings with a laser.
Stopovers save energy
What’s more, the RoboBees can now even land on a branch or similar object in order to save energy – just as bats, birds or butterflies do. “The use of adhesives that are controllable without complex physical mechanisms, are low-power and can adhere to a large array of surfaces is perfect for robots that are agile yet have a limited payload – like the RoboBee,” Wood adds. “When making robots the size of insects, simplicity and low power are always key constraints.” Wood’s team used an electrode patch which exploits electrostatic adhesion, allowing the RoboBee to stick to almost any surface – whether it be glass, wood or the leaf on a tree. For a brief intermediate landing, the patch only requires around a thousandth of the energy needed to take off.
Out in the real world in five to ten years
“Aerial micro-robots have enormous potential for large-scale sensor deployment to inaccessible, expansive and dangerous locations. However, flight is energy-intensive, and the limitations of current energy storage technologies severely curtail in-air operations,” says Jordan Berg, a Programme Director at the NSF (National Science Foundation) who is familiar with the project. The NSF has been co-financing the project for some years. However, the project team won’t be deterred; their work to advance the RoboBee is incessant. It is envisaged that the landing mechanism will become independent of direction, allowing the mini-robot to land anywhere. Work is also being conducted on onboard energy sources for the robot. These would enable the robot to generate its own energy and fly without the wire that has been required until now. Wood estimates that it will take another five to ten years before the RoboBee can actually be let loose in the real world.
(Picture Credits: Unsplash: Kelsey Krajewski)