An der Harvard University arbeiten Forscher aus den unterschiedlichsten Fachgebieten an einem winzig kleinen Flugroboter. Groß wie eine Biene, soll er zukünftig zum Beispiel im Schwarm unzugängliche Gegenden erkunden oder als künstlicher Bestäuber arbeiten.
Immer mehr Roboter kommen auf den Markt, deren Funktion und Form unsere Vorstellungen von einer Maschine sprengen. Eine dieser eher ungewöhnlichen Roboterapplikationen wird an der Harvard University entwickelt: Die Roboterbiene, oder „RoboBee“. Mit ihrem Projekt wollen die Wissenschaftler ein autonomes robotisches Insekt kreieren, das kontinuierlich und unabhängig fliegen kann. Derartige Roboter sollen eines Tages Erkundungsmissionen ausführen, bei der Telekommunikation helfen oder sogar als künstliche Bestäuber arbeiten.
Kontrollierter Flug
Die Forscher von der Harvard University arbeiten zusammen mit Kollegen von der Northeastern University schon seit einigen Jahren an dem Projekt. Bereits im Jahr 2012 konnten die Wissenschaftler der Öffentlichkeit den ersten kontrollierten Flug eines insektengroßen Roboters demonstrieren. Seitdem haben sie immer anspruchsvollere und kleinere Roboter entwickelt. Eines Tages sollen sie völlig autonom fliegen können.
Um dieses Ziel zu erreichen, mussten die Wissenschaftler Grundlagenforschungen in den verschiedensten Feldern vorantreiben: Dazu gehören Methoden der Mikrofertigung genauso wie Materialien für mikroskopisch kleine Antriebe, Energiespeicher im kleinstmöglichen Maßstab genauso wie Algorithmen zur effektiven Steuerung einzelner RoboBees oder auch ganzer Schwärme.
Zu den Highlights zählen unter anderem neue Methoden zur Herstellung von nur wenige Millimeter großen Geräten – zum Einsatz kamen dabei Schicht- und Falttechniken. Auch neue Sensoren wurden entwickelt, die im Low-Power-Bereich oder bei mobilen Computern eingesetzt werden können. Ein weiterer Output der Entwicklungsarbeit sind spezielle Architekturen für Ultra-Low-Power-Rechensysteme. Und schließlich schrieben die Wissenschaftler Algorithmen zur Koordination von hunderten oder gar tausenden Robotern, so dass sie effektiv zusammenarbeiten konnten.
Vorbild Natur
Dabei ließ sich das Projektteam von der Natur inspirieren – insbesondere von den Fähigkeiten, die es Insekten ermöglichen, trotz ihrer winzigen Körper ohne fremde Hilfe abzuheben, zu navigieren und wendige Flugbewegungen durchzuführen.
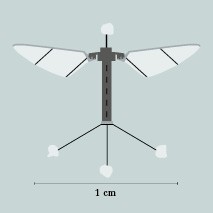
„Bienen und andere soziale Insekten liefern ein faszinierendes Modell für technische Systeme, die sich in unstrukturierten Umgebungen bewegen, ihr Umfeld erfassen, kommunizieren und komplexe Aufgaben als ein Kollektiv relativ einfacher Individuen erfüllen können“, meint Robert Wood, der Leiter des Projektes. „Das RoboBee-Projekt entstand aus dieser Inspiration und hat Lösungen für eine ganze Anzahl fundamentaler Herausforderungen entwickelt – Herausforderungen, die durch die geringen Abmessungen der Individuen und durch die Größe des Kollektivs gegeben sind.“ Die aktuellen RoboBees wiegen gerade einmal 84 Milligramm – und sind damit sogar leichter als reale Bienen, bei ungefähr gleicher Größe. Aktuell arbeitet das Team daran, dass die Miniroboter ihr Umfeld mit einem Laser erfassen können.
Zwischenlandung spart Energie
Zudem können die RoboBees jetzt auch auf einem Ast oder Ähnlichem zwischenlanden, um Energie zu sparen – genauso wie Fledermäuse, Vögel oder Schmetterlinge. „Die Verwendung eines Haftmittels, das ohne komplexe physikalische Mechanismen kontrollierbar ist, das einen geringen Energiebedarf hat und das auf einem breiten Spektrum von Oberflächen haftet, ist perfekt für Roboter, die agil sind, aber nur eine geringe Nutzlast haben – wie unsere RoboBee“, so Wood. „Wenn man Roboter von der Größe eines Insekts baut, sind Einfachheit und niedriger Energieverbrauch immer die größten Herausforderungen.“ Woods Team verwendete ein Elektroden-Patch, das die elektrostatische Adhäsion nutzt. Damit kann die RoboBee an nahezu jeder Oberfläche haften, von Glas über Holz bis zu einem Blatt. Das Patch benötigt für eine Zwischenlandung rund ein Tausendstel der Energie, die für den Start erforderlich ist.
In fünf bis zehn Jahren in der realen Welt
„Mikro-Flugroboter haben ein enormes Potenzial für die groß angelegte Sensorerfassung von unzugänglichen, weiträumigen und gefährlichen Gegenden. Aber Fliegen ist energieintensiv, und die Grenzen heutiger Energiespeicher-Technologien schränken Luftoperationen erheblich ein“, so Jordan Berg, der als Programmdirektor der National Science Foundation (NSF) das Projekt kennt. Die NSF finanziert das Projekt schon seit Jahren mit. Aber das Projektteam lässt sich nicht beirren und entwickelt die RoboBee kontinuierlich weiter. Der Landemechanismus soll richtungsunabhängig werden, sodass der Miniroboter überall landen kann. Zudem wird an Energiequellen gearbeitet, die sich an Bord des Roboters befinden. Damit könnte der Roboter seine Energie selber erzeugen und ohne den bisher benötigten Draht fliegen. Wood schätzt, dass es noch einmal fünf bis zehn Jahre dauern wird, bevor die RoboBee tatsächlich in der realen Welt eingesetzt werden kann.
(Bildnachweis: Unsplash: Kelsey Krajewski)