Radar Technology is nothing new. Yet in view of current developments, radar technology in autonomous vehicles is becoming ever more precise and powerful.
Radar is a fundamental part of the automated driving equation,” explains Peter Austen, Global Portfolio Director, Driver Assist Systems at ZF’s Active & Passive Safety Technology division – or ZF TRW for short. “When combined with cameras, intelligent control units and actuators, it can help to enable partially automated driving functions.” ZF TRW has been designing and developing radar in Brest since 1999.
Luxury early on
As early as the start of World War II, radar technology was being used on board aeroplanes and ships. Despite this, its first appearance in cars wasn’t until 1998, when Mercedes-Benz introduced a distance radar in the S-Class. Still, the cost of this technology was very high at the time, owing to the fact that until 2009, the required semiconductors could only be manufactured using gallium arsenide (GaAS) – an expensive and difficult material to process. A further disadvantage is the low level of integration; the ability to combine an increasing number of functions on an unchanging chip area. Only with the manufacturing of sensors in silicon germanium technology (SiGe) – the most frequently used materials for semiconductor manufacturing – did the systems become affordable. This enabled tried-and-tested standard processes to be implemented in mass production for the first time. What’s more, a whole host of functions could now be condensed onto just two SiGe components, where previously up to eight GaAs chips had been required.
Detection is becoming ever more powerful
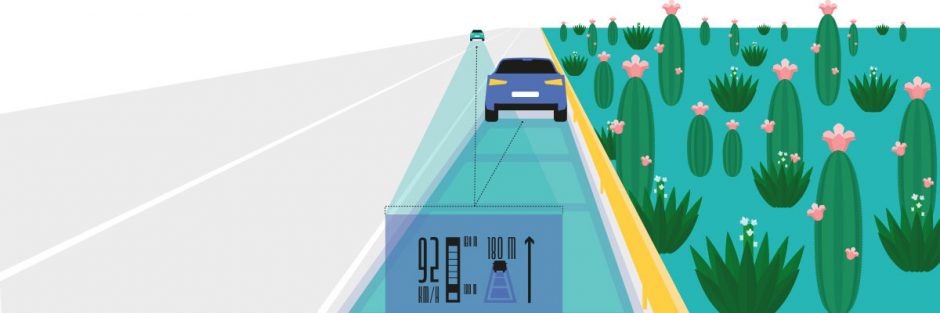
Radar systems applied in autonomous vehicles work with millimetre precision – nowadays in the range of either 24/26 GHz or 77/79 GHz. This means that high resolutions are possible for detecting objects and determining their position and movement with centimetre accuracy. When compared to other technologies, such as camera-based methods, the radar works reliably even in conditions of poor visibility such as snow, fog, torrential rain and dazzling backlight. What’s more, the complete systems are not much bigger than a matchbox.
One fundamental difference can be drawn between two types of radar: the frequency-modulated continuous-wave (FMCW) and the impulse radar. Unlike an impulse radar, which emits only one pulse, FMC radars transmit pulses continually. With the FMCW method, the signal is modulated over the entire range during transmission, meaning that the frequency varies over time – this is called chirp. This chirp is repeated in cycles and enables FMC radars to simultaneously measure the absolute distance between the transmitter and object in addition to the differential speed between the two. The devices have admittedly had a weakness – until now: if objects approach at different speeds, it is possible that the radar might “overlook” one of them. Previous devices could therefore only reliably detect objects up to a relative speed of 50 km/h. One solution is to increase the modulation rate. What is referred to as fast chirp modulation (FCM) brings about an increase in the accuracy of distance measurement, enabling a wider range of target object speeds to be covered. Yet an increase in outside temperature causes the pulses of standard CMOS signal generators to slow, resulting in errors. To tackle this issue head-on, Fujitsu released a CMOS-based millimetre-wave signal generator in late 2016, which is capable of maintaining its modulation rate reliably and precisely even at temperatures of 150° Celsius. This allows detection errors to be reduced and even objects approaching the vehicle at a relative speed of 200 km/h are reliably detected.
Over 100 years old
Yet radar technology is in fact much older: it was as early as 1904 in Düsseldorf that the German engineer Christian Hülsmeyer developed the first practical application for the reflection of electromagnetic waves on objects – the Telemobiloscope. Similar to modern radar sensors, it transmitted focussed electromagnetic radiation – radio waves. In modern radar systems, analysing the reflected radiation allows objects to be detected along with their respective distance and speed.
Radar navigation
Despite all this, radar devices are not used in autonomous vehicles merely to detect and locate objects. At some point in the future at least, radar is intended to be used for navigation. With this in mind, Bosch and the Dutch map and traffic information provider TomTom have now become the first to create a high-resolution map with a localisation layer using radar reflection points – albeit solely for road vehicles. So far, video data has been used for this purpose. Bosch’s “radar road signature” is made up of billions of individual reflection points. These are formed everywhere that radar signals hit – for example, on crash barriers or road signs – and reproduce the course a road takes. Automated vehicles can use the map to determine their exact location in a lane down to a few centimetres. The huge advantage of the radar map is its robustness: localisation with the radar road signature also works reliably at night and in conditions of poor visibility. Moreover, only five kilobytes of data are transmitted to a Cloud per kilometre. This data volume is at least twice as high using a video map. It is expected that by 2020 at the latest, the first vehicles will provide data for the radar road signature in Europe and the U.S. “Cars arriving on the market in years to come with the assistance functions of tomorrow will be running the map for the automated vehicles of the future,” says Bosch Board Member Dr Dirk Hoheisel.