Sensorik, Rechen-Power und die Fähigkeit zu lernen sind die technologischen Grundlagen autonomer Fahrzeuge. Je mehr Funktionen die Technologie übernimmt, umso höher ist das Level der Automatisierung – bis hin zum völlig fahrerlosen Fahrzeug.
Die Wurzeln für autonome Fahrzeuge reichen weiter zurück, als man gemeinhin meint: Bereits Anfang des 20. Jahrhunderts entwickelte Elmer Sperry ein erstes kreiselkompassgesteuertes Steuerungssystem, mit dem Schiffe automatisch auf Kurs gehalten werden konnten. 1928 wurde dann die erste automatisierte Flugzeugsteuerung auf der Internationalen Luftfahrtausstellung in Berlin gezeigt, entwickelt von Johann Maria Boykow. Doch echtes autonomes Fahren erfordert weitaus mehr, als das Fahrzeug nur auf einem bestimmten Kurs zu halten: Es muss ohne menschliche Steuerung oder detaillierte Programmierung ein vorgegebenes Ziel selbstständig erreichen. Es muss auf Hindernisse genauso reagieren können wie auf unvorhergesehene Ereignisse.
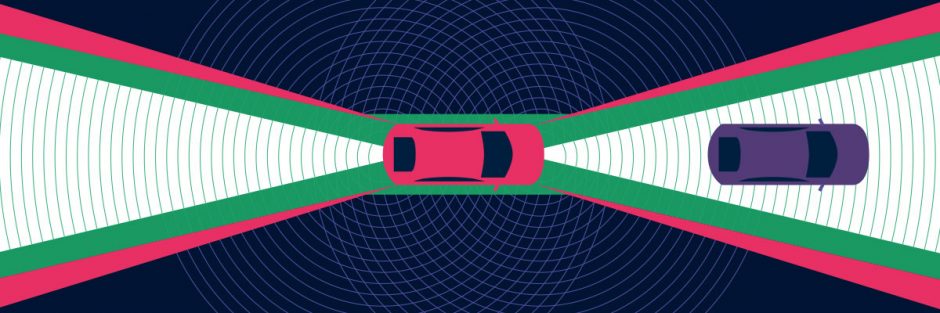
Die Umfelderfassung ist eine der wesentlichen Fähigkeiten autonomer Fahrzeuge.
Vom Assistenzsystem zum autonomen Fahren
Der Weg hin zu einem vollständig autonomen System ist gleitend. Zur Klassifizierung des Automatisierungsgrades hat ein sechsstufiges System weltweite Anerkennung gefunden – es wurde unter anderem vom Internationalen Verband für Automobilingenieure SAE definiert, wird heute aber auch für andere Fahrzeugsegmente herangezogen. Danach entspricht die Stufe 0 einem Fahrzeug ohne jegliches Assistenzsystem, hier ist alleine der Fahrer für alle Funktionen zuständig. Im Level 1 unterstützen erste Assistenzsysteme den Fahrer wie zum Beispiel ein Tempomat. Teilautomatisierte Fahrzeuge mit Einpark- und Spurhaltesystemen, die also bereits Lenkbewegungen automatisiert durchführen können, zählen zum Level 2. Im Level 3 steuert sich das Fahrzeug größtenteils allein, der Fahrer muss das System nicht mehr dauerhaft überwachen. Die vollautomatisierten Fahrzeuge des Levels 4 meistern auch Risikosituationen ohne menschliche Hilfe, sind jedoch auf bekannte Strecken begrenzt. Erst im Level 5 wird vollständig autonom gefahren, in jeder Umgebung und in jeder Situation.
In begrenzten Räumen, wie in der Landwirtschaft, der Intralogistik, bei Stadtbahnen oder im Bergbau, sind bereits seit längerem hoch- und vollautomatisierte Fahrzeuge der Level 3 und 4 im Einsatz. Im Straßenverkehr dagegen sind jetzt erst Autos des Levels 3 unterwegs. Erste serienreife Autos, die zumindest unter bestimmten Bedingungen im realen Straßenverkehr ohne Fahrer auskommen (Level 4), sollen ab dem Jahr 2020 angeboten werden.
Damit ein Fahrzeug autonom sein Ziel erreichen kann, benötigt es verschiedene Fähigkeiten: Als Erstes muss es die Umgebung, durch die es sich fortbewegt, wahrnehmen – ansonsten würde es bereits am ersten Hindernis scheitern. Um dies zu verhindern, sind autonome Fahrzeuge mit den unterschiedlichsten Sensoren ausgerüstet: Ultraschallsensoren werden beim automatisierten Fahren vor allem für die Umgebungserkennung im Nahbereich bis zu sechs Metern und bei niedrigen Geschwindigkeiten, zum Beispiel beim Parken, benötigt. Radarsensoren liefern auf größere Entfernung wichtige 360-Grad-Umfeldinformationen. Die Hauptaufgabe eines Radarsensors ist das Erkennen von Objekten sowie die Messung von deren Geschwindigkeit und Position im Vergleich zur Bewegung des eigenen Fahrzeugs. Relativ neu sind Lidar-Sensoren, die mit unsichtbarem Laserlicht die Umgebung „abtasten“ und eine hochaufgelöste 3D-Karte des Umfelds erzeugen können. Videosensoren, vor allem in Stereo-Video-Kameras, liefern zusätzlich wichtige optische Informationen wie die Farbe eines Objektes. Jedes dieser Sensorsysteme hat seine Stärken und Schwächen. Um ein möglichst exaktes und verlässliches Bild der Umgebung zu erhalten, werden daher in autonomen Fahrzeugen – je nach Einsatz – mehrere Sensoren zusammen eingesetzt und ihre Daten „fusioniert“, also zusammengeführt.
Hochauflösende Karten über die Cloud
Neben der Fähigkeit, das Umfeld zu „sehen“, muss ein autonomes Fahrzeug aber auch navigieren können. Über Satellitennavigationssysteme wie zum Beispiel GPS wissen die Fahrzeuge, wo sie sich aktuell befinden und können darauf basierend ihren Weg errechnen. Dabei greifen sie auf hochauflösende, hochaktuelle Karten zurück, die über die reine Topologie hinaus möglichst auch aktuelle Ereignisse wie Staus dynamisch mit einbauen. Diese Karten können lokal im Fahrzeug oder in der Cloud hinterlegt sein. Gerade im letzteren Fall ist ein leistungsstarkes Kommunikationssystem erforderlich, damit die Daten der Karte in Realzeit aktualisiert werden können. Die Basis dafür bildet zum Beispiel der Mobilfunkstandard 5G. Er ermöglicht ein „taktiles Internet“, das neben Übertragungsraten von mehr als zehn Gigabit pro Sekunde eine ultraschnelle Reaktion mit einer Verzögerung von weniger als einer Millisekunde garantiert. So vernetzt, kann für komplexe Berechnungen zur Situationsanalyse oder Wegfindung auf die nahezu unbegrenzten Ressourcen des Cloud-Computing zurückgegriffen werden.
Lernen als Basis für richtiges Reagieren
Denn die Auswertung der gewaltigen Datenmengen, die von den Sensorsystemen des Fahrzeugs generiert werden, sowie die Situationsinterpretation benötigen erhebliche Rechenkapazitäten. Technologien, die unter Künstlicher Intelligenz zusammengefasst werden, gewinnen zunehmend an Bedeutung. Insbesondere das maschinelle Lernen ist ein essenzieller Bestandteil eines autonomen Systems: Erst dadurch erhält das Fahrzeug die Möglichkeit, intelligent und unabhängig vom Menschen zu agieren. Durch das maschinelle Lernen können autonome Systeme neues Wissen aus gesammelten und bereitgestellten Daten generieren und ihre Wissensbasis beständig erweitern. Ohne dieses eigenständige Lernen wäre es nahezu unmöglich, sinnvolle Reaktionen auf alle prinzipiell denkbaren Situationen in einer Programmierung festzulegen.